ROS (Robot Operating System) est un projet open source qui fournit un cadre et des outils pour les applications robotiques. Cela aide à concevoir des logiciels complexes sans savoir comment fonctionne certains matériels.
Noétique est une version LTS de ROS et adaptée à Ubuntu 20.04. Le support ROS Noetic est jusqu'en 2025 (5 ans). Les architectures prises en charge sont amd64, armhf et arm64.
Dans ce didacticiel, nous expliquerons comment installer ROS Noetic sur Ubuntu 20.04 .
1. Ajouter le dépôt Noetic officiel à Ubuntu
La première étape de l'installation de ROS Noetic consiste à ajouter le référentiel officiel ROS Noetic au fichier de liste des sources d'Ubuntu 20.04.
Pour ajouter un dépôt Noetic, tapez :
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.listSortie :
deb http://packages.ros.org/ros/ubuntu focal main.2. Ajouter un porte-clés ROS officiel
Ensuite, ajoutez le trousseau de clés ROS officiel à votre système Ubuntu 20.04. Il y a deux façons de procéder.
La première méthode consiste à utiliser le hkp://keyserver.ubuntu.com:80 Serveur de clés Ubuntu. Si cela ne fonctionne pas, vous pouvez essayer de le remplacer par hkp://pgp.mit.edu:80 . Alors, exécutez la commande ci-dessous.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
La deuxième méthode consiste à utiliser la commande curl pour télécharger le trousseau de clés ROS officiel et l'ajouter localement.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -La sortie "OK" signifie que la clé a été ajoutée avec succès.
3. Mettre à jour l'index des packages ROS
Ensuite, nous mettrons à jour notre système Ubuntu afin d'obtenir les informations du package ROS Noetic à partir du référentiel.
$ sudo apt updateCela synchronisera le référentiel nouvellement ajouté avec les référentiels Ubuntu en ligne.
4. Installez ROS Noetic sur Ubuntu 20.04
ROS propose plusieurs métapaquets que vous pouvez choisir d'installer en fonction de vos besoins spécifiques.
Voici les métapaquets ROS Noetic officiels :
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Choisissez votre métapaquet préféré et installez-le avec l'une des commandes ci-dessous.
Installer ros-noetic-desktop-full
Le package ros-noetic-desktop-full est fourni avec tous les packages de ros-noetic-desktop ainsi que les packages de perception (ros-noetic-perception) et de simulation (ros-noetic-simulators).
Pour installer ros-noetic-desktop-full, exécutez la commande suivante :
$ sudo apt install ros-noetic-desktop-fullAprès avoir exécuté la commande, appuyez sur Y pour procéder à l'installation.
Installer ros-noetic-desktop
Ros-noetic-desktop est une version minimale de ros-noetic-desktop-full. Il contient la plupart des packages de didacticiels, notamment :
- vis
- angles
- tutoriels_communs
- geometry_tutorials
- ros_tutorials
- roslint
- tutoriel_urdf
- tutoriels de visualisation
Pour installer ros-noetic-desktop, exécutez la commande suivante :
$ sudo apt install ros-noetic-desktopInstaller ros-noetic-base
La base ros-noetic ne contient que des packages de base. Il inclut les packages de ros_core et d'autres outils de base non robots tels que la reconfiguration dynamique, les nodelets et actionlib.
Pour installer ros-noetic-base, exécutez la commande suivante :
$ sudo apt install ros-noetic-baseInstaller ros-noetic-core
Le ros-noetic-core contient une collection des paquets minimum nus. Les forfaits incluent :
- common_msgs
- gencpp
- généus
- genlisp
- genmsg
- gennodejs
- genpy
- génération_message
- message_runtime
- pluginlib
- ros
- ros_comm
- rosbag_migration_rule
- rosconsole
Pour installer ros-noetic-core, exécutez la commande suivante :
$ sudo apt install ros-noetic-core5. Configurer l'environnement ROS Noetic
L'étape suivante consiste à configurer l'environnement ROS Noetic. Sourcez d'abord le script setup.bash dans chaque terminal bash qui utilise ROS, tapez :
$ source /opt/ros/noetic/setup.bashAjoutez le fichier .bashrc situé dans votre répertoire personnel pour éviter de s'exécuter à chaque fois que vous lancez un nouveau shell :
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcVérifiez en exécutant la commande suivante :
$ tail ~/.bashrc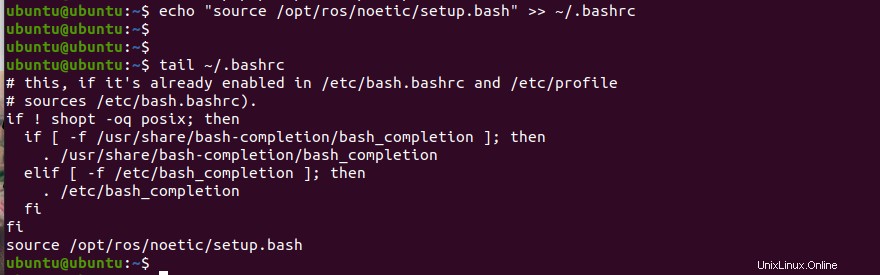
Pour que les modifications prennent effet, tapez :
$ source ~/.bashrc Vérifier l'installation de Noetic
Après avoir installé avec succès ROS Noetic sur Ubuntu 20.04, exécutez simplement la commande roscd.
$ roscdVous remarquerez que le répertoire actuel de votre invite passe à /opt/ros/noetic , où nous avons installé Noetic.

Nous pouvons également vérifier l'installation en exécutant roscore commande dans le répertoire noetic. La sortie affiche la distribution ros et la version ros dans le résumé.
$ roscore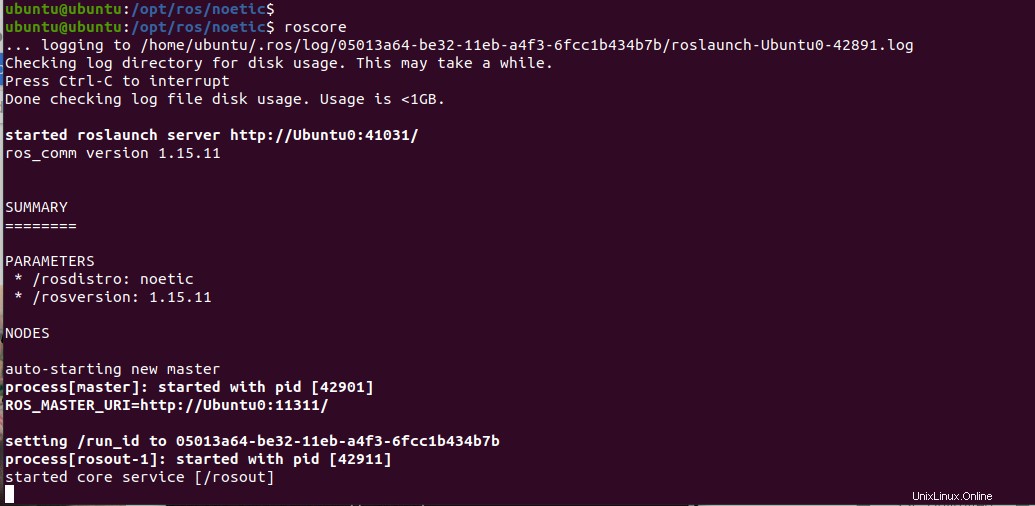
Conclusion
Dans ce tutoriel, nous avons appris comment installer ROS Noetic sur Ubuntu 20.04. Vous pouvez maintenant programmer vos robots avec Noetic.