Linux est enrichi de nombreux logiciels de drones et de robots. Cette industrie est entièrement liée à l'intelligence artificielle et à l'apprentissage automatique, qui nécessitent un autre type d'expertise et de créativité. Depuis l'émergence de la nouvelle ère de la technologie, elle a commencé à jouer un rôle essentiel, principalement dans le domaine de la recherche scientifique. De plus, ce genre de choses n'est pas bon marché à construire et à contrôler. Ainsi, décider d'un produit particulier est déjà assez louche, même si vous êtes expérimenté dans cette industrie.
Meilleur logiciel de drone et de robot
Aujourd'hui, nous allons discuter et vous informer sur le meilleur logiciel de robot et de drone dans le système Linux. Nous avons essayé de choisir pour vous l'application la plus polyvalente et la plus conviviale. Vous en trouverez certains gratuitement, et certains sont chers. Alors, passons en revue le point central ci-dessous!
1. Belvédère
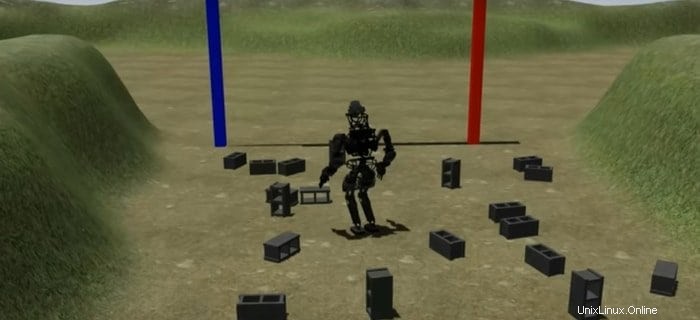
Gazebo est l'un des logiciels de robot les plus populaires et les plus essentiels, suffisamment expert pour tester des algorithmes, concevoir des robots et former le système d'intelligence artificielle (IA). Il vise à fournir les facilités concernant les scénarios réels. Avant d'être un projet indépendant, c'était un élément essentiel du projet Player (également inclus dans ce contenu, voir ci-dessous).
Caractéristiques remarquables de Gazebo
- Gazebo est un simulateur bien conçu qui peut simuler plusieurs robots dans un environnement 3D.
- Il vous permet d'accéder à plusieurs moteurs physiques tels que Bullet, ODE, DART, etc. pour de meilleures performances.
- Vous obtiendrez de nombreux robots pré-construits comme iRobot Create, PR2, Pioneer2 DX, et plus encore avec Gazebo.
- Les utilisateurs peuvent développer des plugins personnalisés pour améliorer la capacité des robots et des capteurs qui peuvent accéder directement à l'API de Gazebo.
- En utilisant le format XML - SDF, vous pouvez créer votre robot personnalisé et également décrire les aspects.
- Fournit un support solide avec des didacticiels utiles qui couvrent les concepts en détail, ainsi que de nombreux exercices pratiques.
2. ArduPilot
ArduPilot est livré avec le logiciel de robot et de drone le plus puissant et le plus avancé écrit en langages C++ et Python. Doté de technologies avancées d'enregistrement de données et de simulation, il a déjà été installé dans plus d'un million de véhicules. Cette plate-forme avancée est sous licence GNU General Public License (v3) et également gratuite.

Caractéristiques remarquables d'ArduPilot
- Il vise à contrôler n'importe quel système de véhicule, y compris de nombreux outils émergents comme les quad-avions, les hélicoptères composés, les multirotors et même les sous-marins.
- Convient à de nombreuses sociétés de drones OEM telles que jDrones, AgEagle, Kespry, etc.
- ArduPilot fonctionne sur plusieurs plateformes, dont Linux et Microsoft Windows.
- Il fournit un support solide via Forum, Github et Facebook. De plus, vous obtiendrez une documentation riche avec cet outil.
- En outre, il prend en charge une large gamme de composants matériels, notamment Copter, Rover et différents matériels embarqués.
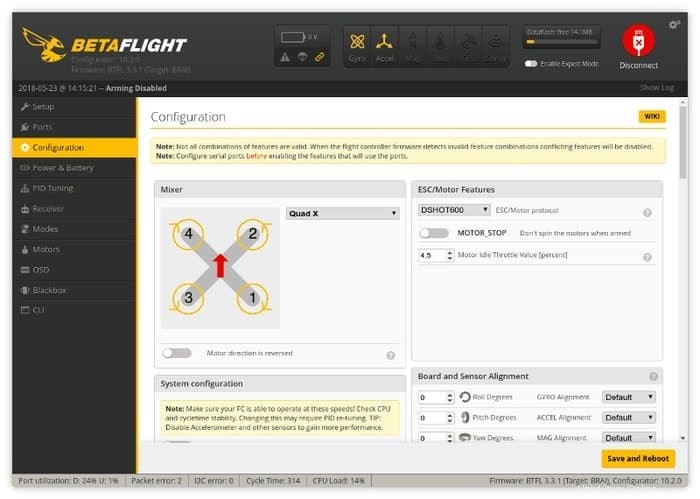
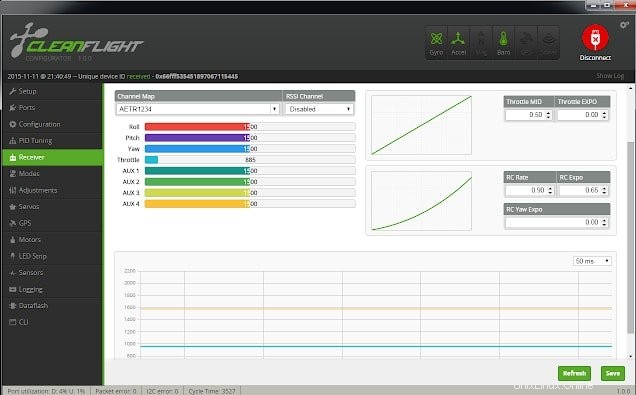
3. BetaFlight
BetaFlight est livré avec un logiciel de drone open source visant à fournir de meilleures performances de vol et un meilleur support. Il offre la meilleure expérience avec des fonctionnalités mises à jour et un processus d'assurance qualité. En outre, il dispose d'un certain nombre de dispositifs de sécurité qui aident à prévenir les comportements dangereux des drones. Vous avez le plein contrôle pour faire face à la situation en cas de problème.
Caractéristiques remarquables de CleanFlight
- Compatible avec la plupart des fabricants de télécommandes, y compris FlySky, Graupner et FrSky.
- À l'aide du contrôleur de vol, vous pouvez contrôler le VTX ainsi que les paramètres de la caméra.
- Il fournit un support communautaire dédié et robuste. De plus, vous obtiendrez de l'aide pour commencer à utiliser son didacticiel vidéo.
- BetaFlight s'exécute sur plusieurs plates-formes, notamment Microsoft Windows, Linux et Mac OS.
4. Atelier Vision de la NASA
NASA Vision Workbench est une bibliothèque de données open source et de traitement d'image visant à fournir diverses tâches de traitement d'image. Vous pouvez travailler sur des analyses scientifiques et techniques automatisées, un traitement approfondi d'images satellites, la perception de robots, etc. avec cet outil. En outre, il prend en charge les opérations au niveau des blocs sur différentes images de projet.
Caractéristiques remarquables de NASA Vision Workbench
- Utilisant des bibliothèques tierces, il a la capacité de lire et d'écrire des fichiers JPEG, PNG, PDS et TIFF.
- Fournit un système convivial et flexible qui aide à déployer différentes applications de vision par ordinateur.
- En plus d'être un outil de traitement à usage général et un cadre de vision industrielle, il vous permet également d'obtenir des installations de reconstruction d'environnement 2D et 3D.
- Il fournit une excellente prise en charge du débogage, du système de type et du cache.
- En outre, il permet différents types de transformations d'image, y compris la rotation, le rééchantillonnage, la traduction et les retours à la ligne arbitraires.
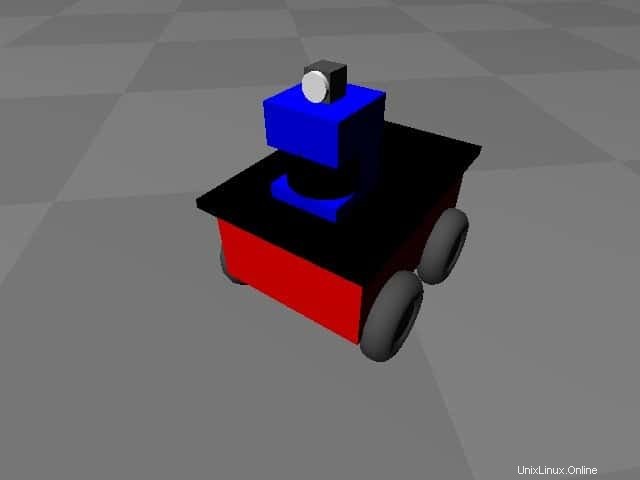
5. Le projet Player
Le projet Player est l'un des outils les plus populaires qui aident à créer des logiciels de robot. L'objectif principal de ce logiciel est de rechercher des systèmes de robots et de capteurs. Il s'agit d'une application open source publiée sous la licence publique générale GNU. Vous pouvez l'utiliser sur une large gamme de matériel, y compris Khephera de K-Team, Obot d100 de Botrics, Garcia d'Acroname et bien d'autres.
Caractéristiques remarquables du projet Player
- Le projet Player fournit une interface minimale et flexible par rapport aux autres outils robotiques.
- Il s'agit d'un serveur de périphériques multiplateforme qui s'exécute sous Windows, Linux, BSD, Mac OS X et Solaris.
- Les utilisateurs peuvent contrôler les robots et les capteurs à l'aide d'interfaces de lecteur standard.
- Il prend en charge plusieurs langages de programmation, notamment C, C++, Python, Ruby, Java et Tcl.
- Avec The Player Project, vous pouvez faire les expériences de robot simulé et les publier dans les revues de robotique importantes.
- Fournit une documentation claire avec un manuel d'utilisation utile afin que les utilisateurs puissent tirer le meilleur parti de cet outil.
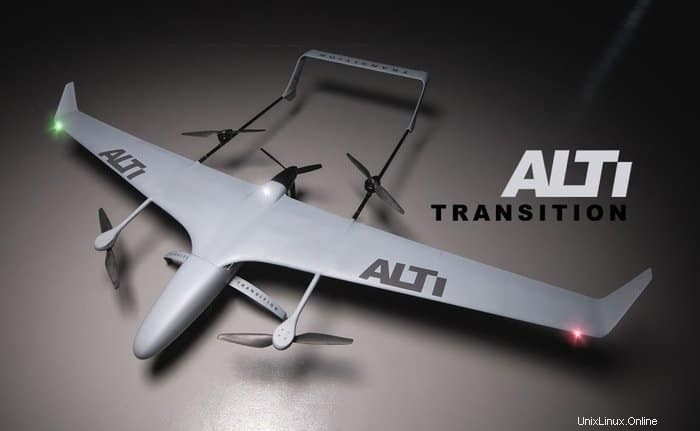
6. PX4
Encore une fois, PX4 est livré avec un logiciel de contrôle de vol moderne et convivial, qui fait partie de Dronecode. Comme nous le savons, Dronecode est l'une des organisations à but non lucratif les plus populaires et les plus connues qui s'occupent de véhicules volants. Cette plate-forme open source est construite avec le langage de programmation C++ sous licence BSD-3-Clause. Il a été développé par l'ETH Zurich (connu sous le nom d'Ecole Polytechnique Fédérale Suisse).
Caractéristiques remarquables de PX4
- PX4 contient une architecture modulaire et extensible qui vise à être utilisée dans différents types de véhicules.
- Il fournit des modes de vol flexibles et puissants avec des outils de développement compagnons.
- Vous pouvez utiliser PX4 gratuitement et le modifier en fonction de vos besoins.
- Il vous permet d'héberger MAVLink, MADSDK et QGroundControl.
- Peut être utilisé à la fois dans les drones grand public, les applications industrielles et également dans diverses plateformes de recherche.
- Fournit une documentation utilisateur essentielle et utile pour que les utilisateurs aient une vue d'ensemble claire du logiciel.
7. FLÉCHETTE
DART fait référence à une bibliothèque open source qui s'exprime sous le nom de Dynamic Animation and Robotics Toolkit. Le Graphics Lab et le Humanoid Robotics Lab du Georgia Institute of Technology ont créé ce projet. Il s'agit d'une plateforme collaborative sous licence BSD et écrite en langage de programmation C++. Vous obtiendrez gratuitement de nombreuses fonctionnalités avec ce logiciel de robot qui peuvent vous aider à faire avancer votre projet de robot.
Caractéristiques remarquables de DART
- Vous obtiendrez une API extensible pour s'interfacer avec la programmation non linéaire et l'optimisation multi-objectifs.
- Il prend en charge plusieurs détecteurs de collision, y compris Bullet, ODE et FCL.
- Il vous permet de calculer la distance minimale et également d'accéder aux états cinématiques d'une entité arbitraire avec ce logiciel.
- DART est une application multiplateforme qui peut s'exécuter sur tous les principaux systèmes, y compris Windows, Ubuntu, FreeBSD, Mac OS et Archlinux.
- Il prend en charge différentes formes telles que le maillage concave, les formes primitives et la grille de voxels probabiliste.
- Fournit un support pour subdiviser la gestion des contraintes grâce à la technique « Island » qui apporte de meilleures performances.
8. CleanFlight
CleanFlight est l'un des logiciels de contrôleur de vol les plus populaires à l'époque moderne. Il s'agit d'un projet open source qui prend en charge une large gamme de composants matériels. Les utilisateurs peuvent l'utiliser gratuitement et contribuer également à l'amélioration de cet outil.
Caractéristiques remarquables de CleanFlight
- Il offre des performances de vol impressionnantes en toute sécurité par rapport à de nombreux autres logiciels connexes.
- Contient une communauté active et conviviale sur Facebook, Github et Twitter pour obtenir les commentaires des utilisateurs. Les développeurs actifs essaient toujours d'améliorer l'expérience utilisateur.
- CleanFlight fournit le code compréhensible, bien testé et bien documenté afin que le développement ultérieur puisse être plus fluide.
- Dispose également d'une documentation utilisateur à jour et utile pour connaître l'installation et la configuration de l'outil.
9. Drone Paparazzi
Paparazzi UAV est un autre progiciel de drone essentiel et gratuit pour la communauté Linux. Il s'agit également d'un projet open source sous la licence publique générale GNU (v2). De nombreux systèmes de véhicules aériens sans pilote ont été utilisés à des fins de recherche et professionnelles à l'aide de ce logiciel.
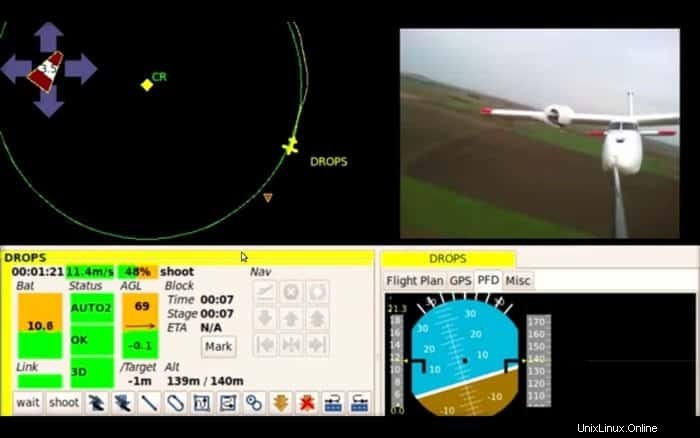
Caractéristiques remarquables de Drone Paparazzi
- Paparazzi vous permet de contrôler le taux de montée à l'aide de l'accélérateur et du tangage.
- Fournit le code source et des didacticiels pour configurer correctement votre appareil.
- Hautement configurable et compatible avec les cellules traditionnelles à voilure fixe et multicopter.
- Il peut s'interfacer avec une large gamme de capteurs, notamment la pression barométrique, le sonar, la température et l'humidité, etc.
10. ARGOS
ARGoS est livré avec un simulateur de robot multi-physique qui peut simuler des essaims de robots à grande échelle avec des performances élevées. Ce système logiciel de robot est publié sous la licence MIT. Il fournit plusieurs moteurs physiques et peut les exécuter dans la même expérience. En outre, il vous permet d'ajouter facilement de nouveaux actionneurs, robots, capteurs et moteurs physiques grâce à son interface conviviale.
Caractéristiques remarquables d'ARGoS
- Vous pouvez personnaliser le projet en ajoutant de nouveaux plugins pour améliorer les fonctionnalités selon vos besoins.
- Fournit au manuel de l'utilisateur et du développeur une documentation appropriée pour informer les utilisateurs en détail.
- Ceci est considéré comme un outil essentiel pour aider à la recherche et obtenir des données optimisées et précises.
- Il fonctionne sur plusieurs plates-formes, dont Linux et Mac OS X.
11. OpenDroneMap
OpenDroneMap est livré avec une boîte à outils en ligne de commande qui permet de générer des cartes, des nuages de points et des DEM à partir d'un drone. C'est un écosystème ouvert pour collecter et traiter les données aériennes avec ses fonctions extraordinaires. OpenDroneMap est un produit open source sous licence GPLv3. Il permet aux utilisateurs d'accéder à ses fonctions via une interface Web minimale.

Caractéristiques remarquables de OuvrirDroneMap
- Fournit une API conviviale et extensible pour visualiser et stocker des images de manière fluide.
- Il fonctionne sur plusieurs plates-formes, dont Linux, Windows et Mac OS.
- Il fournit également une documentation appropriée avec des instructions de configuration sur différentes plates-formes.
12. LibrePilot
Depuis le début de ce projet en 2015, LibrePilot a fonctionné pour l'amélioration de la recherche et du développement de la robotique et du contrôle et de la stabilisation des véhicules. LibrePilot est écrit en langages de programmation C et C++ par l'équipe OpenPilot. Comme la plupart des projets ci-dessus, il fonctionne également sur les systèmes Linux, Mac, Windows et Android.
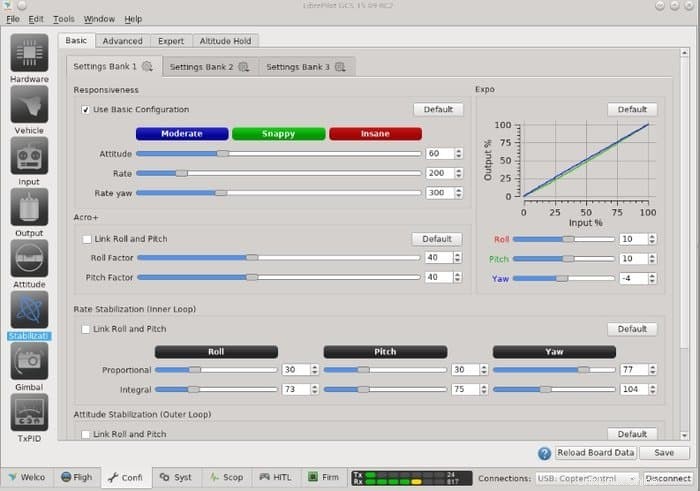
Caractéristiques remarquables de LibrePilot
- Il prend en charge plusieurs protocoles d'entrées (PPM, PWM, DSM Sat, HoTT, etc.) et de sorties (PWM, OneShot125, OneShot42, PWMSync. etc.).
- Vous permet d'utiliser plusieurs FlightControllers comme Revolution, Sparky2, CC3D, et plus.
- LibrePilot prend en charge plusieurs protocoles de télémétrie, dont MAVLINK et MSP.
- Il permet de contrôler le décollage automatique, l'atterrissage automatique et le vol autonome.
- Les utilisateurs peuvent travailler avec différents modes de vol. Il peut s'agir de l'attitude, du manuel, du tarif, etc.
13. dRonin
dRonin est un logiciel convivial et simple pour contrôler les quadricoptères et divers systèmes de petits avions. Il est livré avec une interface facile à utiliser et largement utilisée. dRonin est un produit open source sous licence GPLv3 et également gratuit à utiliser. Il convient principalement à différents types de courses et de vols autonomes. Vous pouvez l'utiliser comme plate-forme idéale pour les micro-contrôleurs de vol avec des capteurs de base.
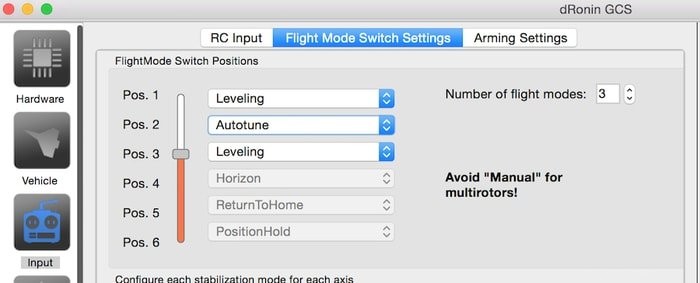
Caractéristiques remarquables de dRonin
- Fournit un environnement flexible pour piloter une machine bien réglée grâce à son assistant de configuration et à ses fonctionnalités.
- Il prend en charge de nombreux matériels, notamment Sparky, BrainFPV, DTF Seppuku, etc.
- Compatible avec un grand nombre de robots et d'accessoires.
- Il permet aux utilisateurs de contrôler divers avions, hélicoptères, hexcoptères RC conventionnels, etc.
- Fournit une documentation facile à comprendre et une communauté active sur des plateformes sociales et professionnelles telles que Facebook et Github.
14. OpenRTM-aist
OpenRTM-aist est livré avec une plate-forme logicielle, notamment pour le développement de systèmes robotiques. L'Institut national des sciences et technologies industrielles avancées a développé cet outil basé sur des composants RT. Il est écrit en langages C++, Java et Python.
Caractéristiques remarquables d'OpenRTM-aist
- Licence sous GNU Lesser General Public License et également Eclipse Public License.
- Il fournit une documentation claire avec les directives d'installation complètes.
- OpenRTM-aist contient une communauté active, comprenant un forum, une liste de diffusion, des formations et des concours.
- C'est un logiciel multiplateforme qui prend en charge les systèmes Windows, Linux/Unix, Mac OS et FreeBSD.
- Fournit un environnement de communication flexible entre différents RTC.
15. Code drone
Dronecode est un progiciel de drone moderne et avancé pour les startups académiques, industrielles et agiles. Il est livré avec un projet open source hébergé sous The Linux Foundation et doté d'un large éventail de fonctionnalités flexibles. Dronecode est construit avec Python, Java et Objective C. Outre la fabrication de drones, il peut également être largement utilisé pour la recherche scientifique.

Caractéristiques remarquables de Dronecode
- Il fournit une licence BSD permissive compatible IP avec une gouvernance neutre et transparente.
- Un système flexible pour tous les types de véhicules, y compris les VTOL, les voilures fixes, les multicoptères et les véhicules terrestres.
- Can be used in different purposes like surveying and inspections, racing, aerial photography, medical supply, and more.
- Supports high latency telemetry and structure scanning. Also, it provides the facility of wind estimator.
- Contains an active and friendly community that supports its users in almost every step.
- You can run Dronecode on different platforms, including Linux, Mac OS X, Windows, and Android.
16. URBI
Now, it’s time to let you know about another open source robotics platform, URBI. It refers to the Universal Robot Body Interface that is built to develop complex robotic applications. This platform is licensed under the GNU Affero General Public License. It provides a standard API that helps to describe various algorithms and sensors.
Noteworthy Features of URBI
- URBI provides an easy-to-use interface using C++ component library.
- It provides the facility of voice recognition, voice synthesis, face detection, and face recognition.
- You can also detect color blob using this platform.
- It is a scripted language that can access sensors, speakers, and other components of the robot.
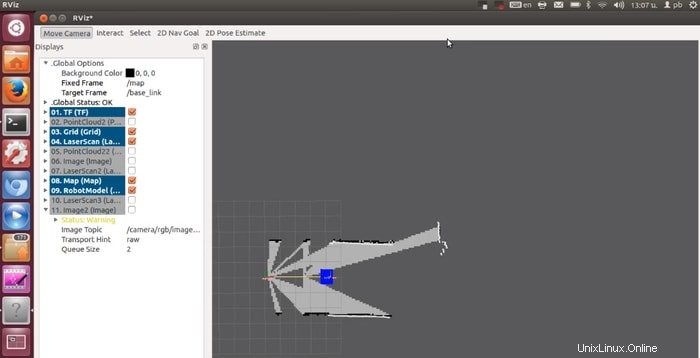
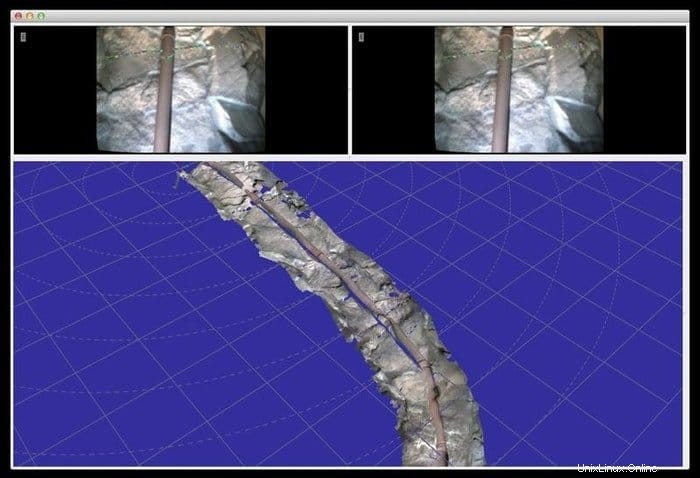
17. ROS
ROS comes with a flexible and accessible framework to create modern robot applications, written in C++, Python, and Lisp languages. The full meaning of this tool refers to the Robot Operating System, which is entirely open source and released under the BSD license. Also, it provides internationalization support in different languages, including German, English, Italian, Korean, Brazilian, Thai, and more.
Noteworthy Features of ROS
- It brings with a wide range of tools and libraries to make the task of building sophisticated robots flexibly and securely.
- Provides strong support and tutorials to get step-by-step instructions to learn this tool properly.
- Compatible with major platforms like Linux, Mac OS, and Windows.
- Includes over 2000 software libraries, many useful APIs, and also a wide range of standard tools for developing and debugging purposes.
18. Fawkes
Fawkes comes with a robot software framework to create and run real-time robotic applications. This program is written in C++ programming language released under the GNU General Public License v2. It brings a complete package with clean structure and documentation in most of the professional areas. Also, it is free to use.
Noteworthy Features of Fawkes
- Provides a component-based approach to increase the efficiency of the application.
- Fawkes runs best on modern Linux and Unix systems, including Fedora and also on FreeBSD.
- Using hybrid blackboard system, it helps to make the communication without conflicting commands.
- It lets you use FireVision, an integrated computer vision framework which helps to transmit images over the network for visual debugging.
- Also, it provides a component-based design and compatible with a variety of platforms.
19. Rock
Rock is a specialized robotic software framework for Linux system, developed in C++ and Ruby languages by DFKI Robotics Innovation Center. It provides the facility of error detection, reporting, handling, and smoothly managing large systems. This Robot Construction Kit helps users to run reliable and high-performance robotic systems in different applications.
Noteworthy Features of Rock
- Rock provides a sustainable system to build modern robots.
- It lets you extend the functionality by adding new components in your robot.
- Complete tutorial package to let users create libraries, configure and connect components, installing packages, and more.
- It contains a flexible graphical user interface. Also, it provides 2D and 3D visualization support using QT-Framework and VizkitWidget.
20. CARMEN
CARMEN, an open source collection of a robot software framework, refers to Carnegie Mellon Robot Navigation Toolkit. Carnegie Mellon University developed this application aims to sensor control, obstacle avoidance, logging, and path planning. Though it is written in C language, it can also provide Java support.
Noteworthy Features of CARMEN
- A proper toolkit for Linux platform under General Public License.
- It supports various hardware, including iRobot ATRV, ActiveMedia Pioneer 1 and 2, OrcBoard, Segway, and more.
- CARMEN provides the facility of localization, scan-matching, and a mapping module.
- Also, it supports different sensors like the SICK LMS laser measurement system, Sonar, Hokuyo IR, and more.
- Provides complete documentation with download and installation process.
Wrap Up
So, it’s time to finish up our discussion on finding the drone and robot software for Linux system. We tried to sort out the most popular and user-friendly applications for our users so far. From the software mentioned above, you will find most of them as open source and free to use. Besides these, let us know if you have any other choices.
Finally, you are requested to share this article with your beloved communities to let other people know about this. Thanks for your valuable time.